|
|
| एमओक्यू: | 1 |
| कीमत: | US $3500.00 - 4900.00/ Set |
| मानक पैकेजिंग: | कार्डबोर्ड बॉक्स/लकड़ी का बक्सा |
| वितरण अवधि: | 6~8 सप्ताह |
| भुगतान विधि: | टी/टी |
| आपूर्ति क्षमता: | प्रति वर्ष 500 सेट |
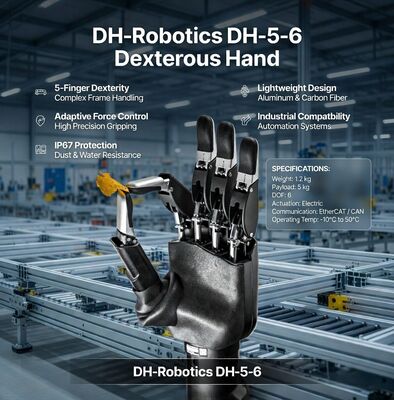
DH-रोबोटिक्स DH-5-6 एक 5-उंगली वाला टेंडन-संचालित निपुण रोबोटिक हाथ है जिसमें 6 सक्रिय डिग्री की स्वतंत्रता है। इसे ह्यूमनॉइड रोबोट, सहयोगी रोबोट और अनुसंधान प्लेटफार्मों के लिए डिज़ाइन किया गया है जिन्हें मानव-जैसी पकड़, बल नियंत्रण और धारणा की आवश्यकता होती है। यह हाथ एकीकृत माइक्रो लीनियर एक्चुएटर्स का उपयोग करता है और सटीक और आज्ञाकारी हेरफेर के लिए हाइब्रिड स्थिति-बल नियंत्रण का समर्थन करता है।
| पैरामीटर | विनिर्देश |
|---|---|
| उंगलियां | 5 उंगलियां (मानव-जैसी) |
| सक्रिय डिग्री की स्वतंत्रता | 6 |
| कुल जोड़ | 12 |
| ड्राइव सिस्टम | माइक्रो लीनियर एक्चुएटर्स के साथ टेंडन-संचालित |
| सेंसिंग | बल / स्पर्श संवेदक |
| नियंत्रण मोड | स्थिति + बल हाइब्रिड नियंत्रण |
| संचार | CAN / RS485 / EtherCAT |
| वजन | लगभग 400-550 ग्राम |
| उंगली पकड़ने का बल | 5-15 N प्रति उंगली (विशिष्ट) |
कृपया प्रदान करें:
|
|
| एमओक्यू: | 1 |
| कीमत: | US $3500.00 - 4900.00/ Set |
| मानक पैकेजिंग: | कार्डबोर्ड बॉक्स/लकड़ी का बक्सा |
| वितरण अवधि: | 6~8 सप्ताह |
| भुगतान विधि: | टी/टी |
| आपूर्ति क्षमता: | प्रति वर्ष 500 सेट |
DH-रोबोटिक्स DH-5-6 एक 5-उंगली वाला टेंडन-संचालित निपुण रोबोटिक हाथ है जिसमें 6 सक्रिय डिग्री की स्वतंत्रता है। इसे ह्यूमनॉइड रोबोट, सहयोगी रोबोट और अनुसंधान प्लेटफार्मों के लिए डिज़ाइन किया गया है जिन्हें मानव-जैसी पकड़, बल नियंत्रण और धारणा की आवश्यकता होती है। यह हाथ एकीकृत माइक्रो लीनियर एक्चुएटर्स का उपयोग करता है और सटीक और आज्ञाकारी हेरफेर के लिए हाइब्रिड स्थिति-बल नियंत्रण का समर्थन करता है।
| पैरामीटर | विनिर्देश |
|---|---|
| उंगलियां | 5 उंगलियां (मानव-जैसी) |
| सक्रिय डिग्री की स्वतंत्रता | 6 |
| कुल जोड़ | 12 |
| ड्राइव सिस्टम | माइक्रो लीनियर एक्चुएटर्स के साथ टेंडन-संचालित |
| सेंसिंग | बल / स्पर्श संवेदक |
| नियंत्रण मोड | स्थिति + बल हाइब्रिड नियंत्रण |
| संचार | CAN / RS485 / EtherCAT |
| वजन | लगभग 400-550 ग्राम |
| उंगली पकड़ने का बल | 5-15 N प्रति उंगली (विशिष्ट) |
कृपया प्रदान करें: